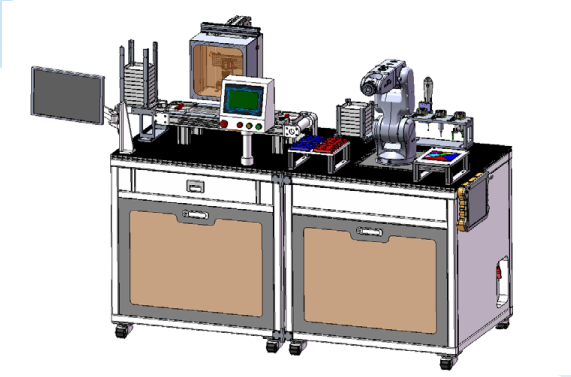
开放式工业机器人科教实训系统(应用柔性生产线)由两个工站组成,一个工站为六轴机器人工站,另一个工站为机器视觉应用工站,该系统既能满足机器人学相关原理及底层控制实验,又可以完成产品的分拣、组装、加工等典型的应用实训场景。
六轴机器人工站是以六自由度机械臂为被控对象的教学实验系统,主要包括六轴工业机械臂、开放式融合控制系统、末端操作工具、开发 pc 机,能够实现正/逆运动学解算、轨迹的规划与插补、动力学解算与动力学参数辨识等教学实验。
机器视觉应用工站主要用于产品上料和在线视觉检测,主要包含上料模块(默认为气动上料模块,可选配直角机器人上料模块)、传送带模块、在线视觉检测模块、视觉控制器模块、电控模块和实训机台等组成。该单元基本动作流程为:①上料模块推送透明托盘(托盘内载入随机摆放的工件)到传送线上。②托盘途径皮带线上的视觉检测区域,到位传感器会触发相机拍照或直接控制皮带停止。③完成图像处理后皮带线会继续往前传输,托盘触发传输线末端的到位传感器,夹紧气缸会固定托盘的位置,并传递检测的结果给下一个工站。